Interaction with Cobots
Flanders Make gave us the assignment to explore interaction with cobots in flexible assembly and production environments. What should this interaction be like in 10 to 15 years? The project started at the beginning of 2017, and reached its end in 2019. Our project partners are Audi and Kuka.
Interaction scenarios
In order to envision what cobots should be in the near future, we started from our own perspective on embodied interaction. After laying out different interaction scenarios, we decided to bring the physical and the virtual closer to one another by projecting information over the cobot and its surroundings. In other words, we wanted to enhance the cobot work cell with projection-based augmented reality. In order to do so, we built two physical setups, in which we combined the KUKA IIWA cobot with projections on a work surface.








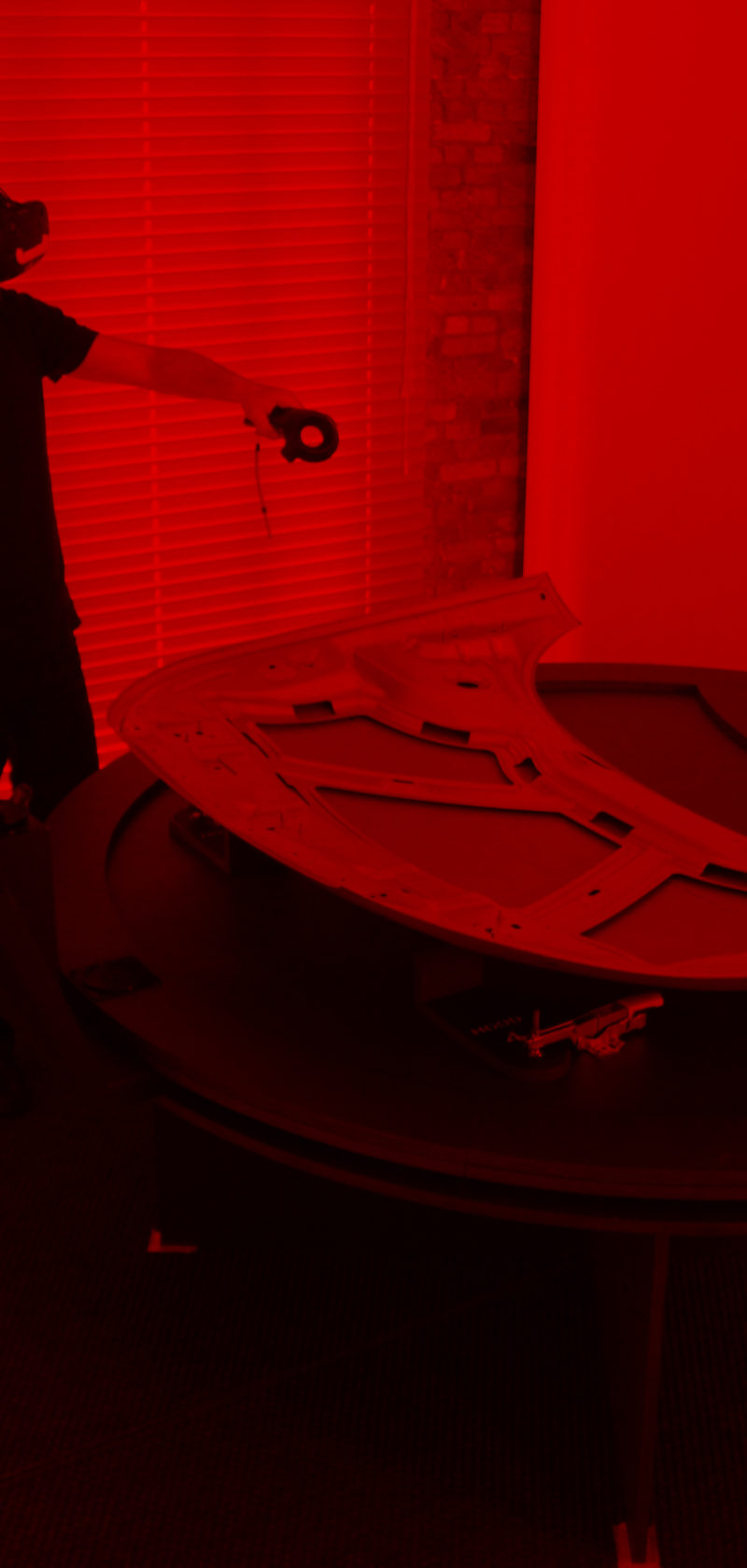
Scale model
The first setup was a 1/6 scale model, in which the task of the cobot was to check the adhesion quality of the Audi A1 hood. By projecting directly on the hood itself, spots with poor adhesion could be marked immediately by the operator on the workpiece.

Real model
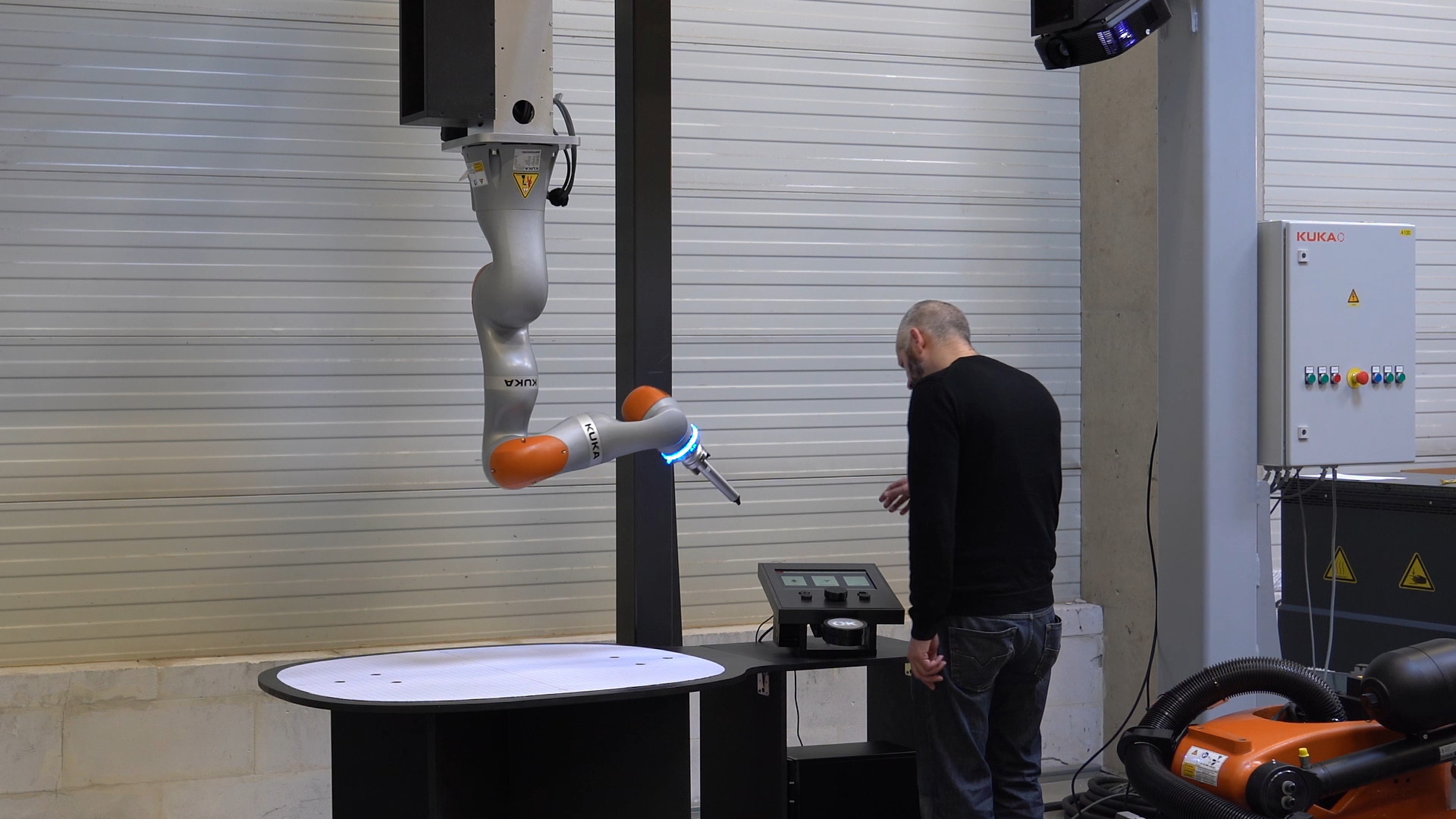
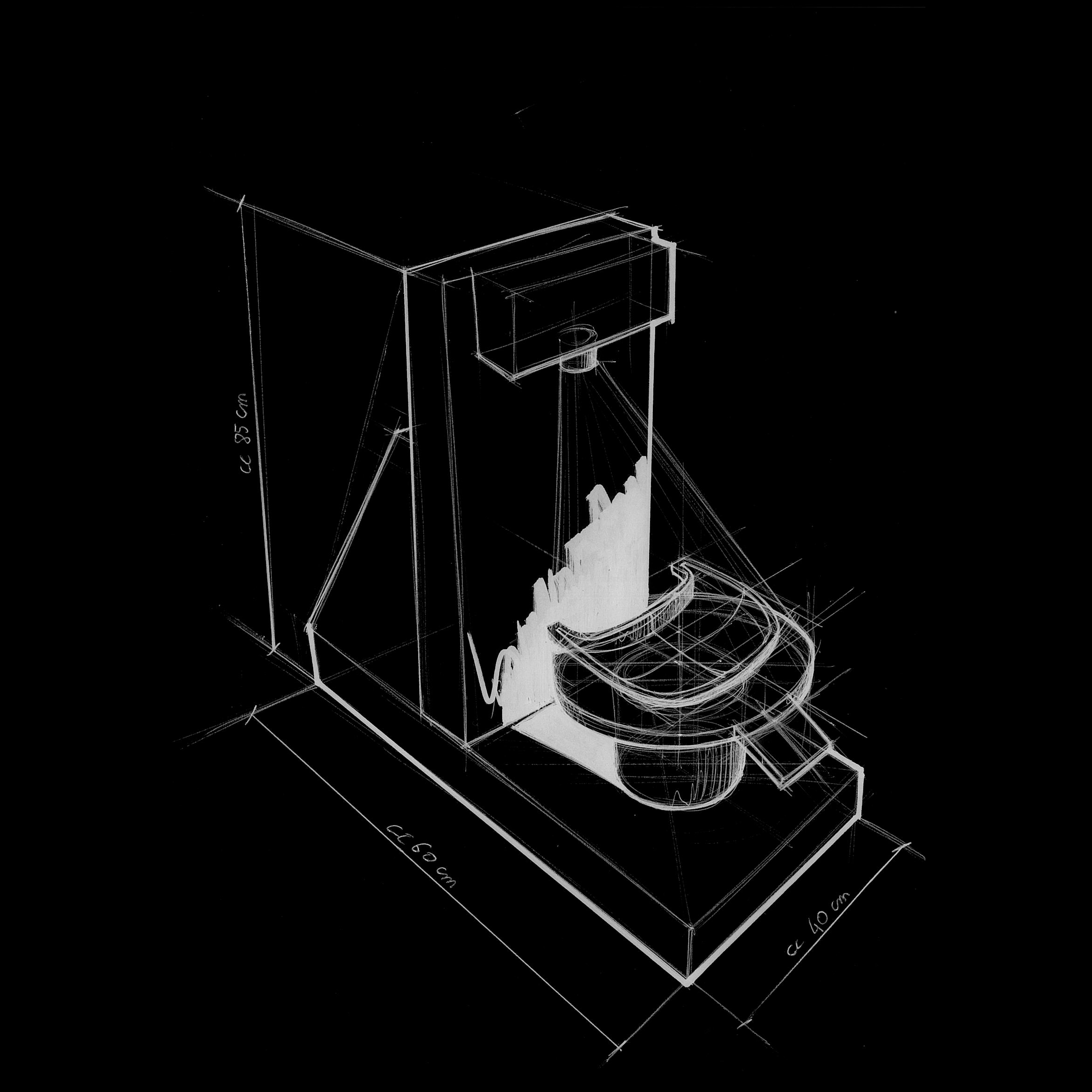
The second setup was a 1/1 experience prototype featuring a horizontal work surface with two projectors above it and a wooden dummy of the KUKA IIWA. The task at hand was the contour check of a longboard deck. In this setup, we combined two interaction styles:
• Traditional computer-like interaction on a separate control unit with a touch display.
• Direct, physical interaction with the work surface and the cobot. This interaction was augmented with projection on the work surface.

Simultaneously, Kuka developed the software for the force-based tracking of the longboard contour. Currently, we are working towards a final setup which will integrate the two interaction styles with a real KUKA IIWA, performing a real task.
Final model